Der Synchron-Reluktanzmotor wurde speziell für drehzahlvariablen Betrieb am Umrichter entwickelt
Energiesparende Antriebe erfüllen die EU Richtlinie EG640/2009 für Motoren und Pumpen im Leistungsbereich von 750 W bis 375 kW
-
 Prof. Prof. h. c. mult. Dr.-Ing. Peter F. Brosch beschäftigt sich seit rund 55 Jahren mit dem Reluktanzmotor.
Prof. Prof. h. c. mult. Dr.-Ing. Peter F. Brosch beschäftigt sich seit rund 55 Jahren mit dem Reluktanzmotor. -
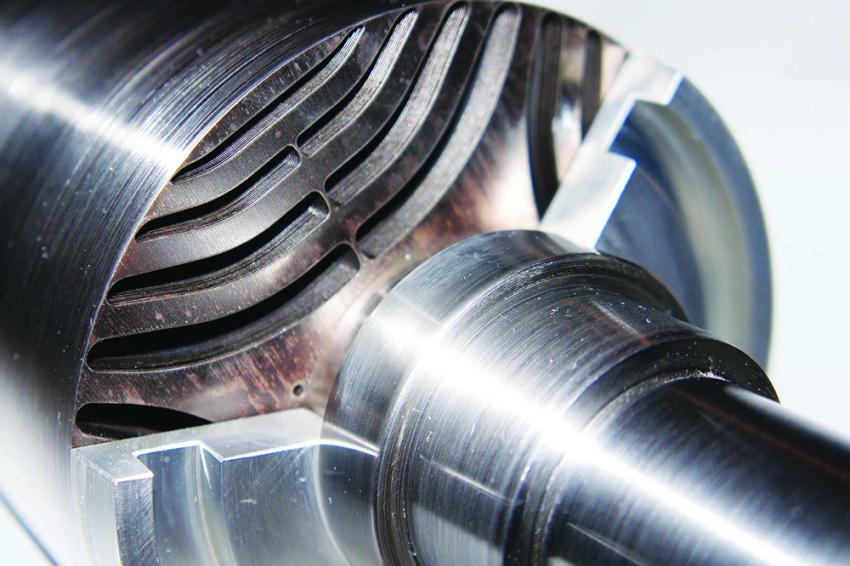 Abb. 1: Blick auf den Läufer eines Reluktanzmotors. (C) Brosch
Abb. 1: Blick auf den Läufer eines Reluktanzmotors. (C) Brosch -
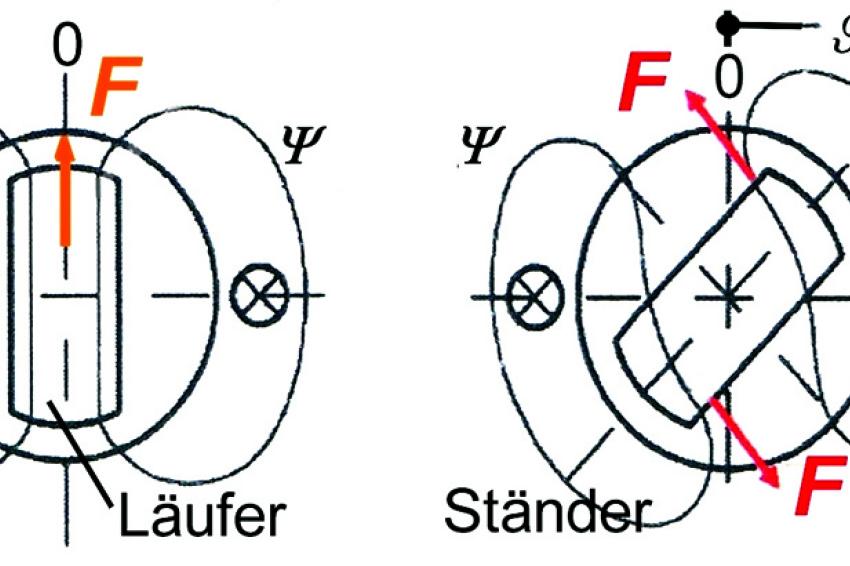 Abb. 2: Arbeitsprinzip des Reluktanzmotors. (C) Brosch
Abb. 2: Arbeitsprinzip des Reluktanzmotors. (C) Brosch -
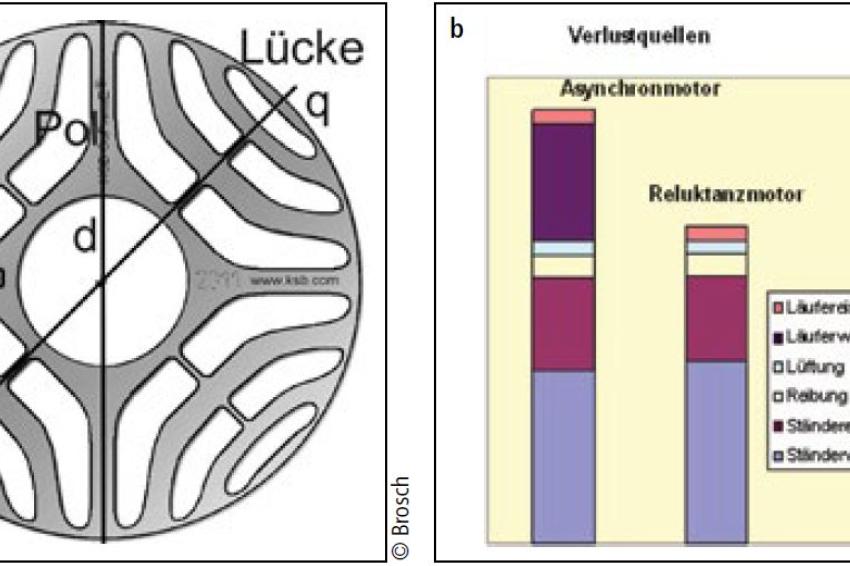 Abb. 3a+b: Synchron-Reluktanzmotor versus Asynchronmotor. a: Läuferblech eines Synchron-Reluktanzmotors (KSB). b: Läuferverluste im Vergleich zum Asynchronmotor (ABB). (C) Brosch
Abb. 3a+b: Synchron-Reluktanzmotor versus Asynchronmotor. a: Läuferblech eines Synchron-Reluktanzmotors (KSB). b: Läuferverluste im Vergleich zum Asynchronmotor (ABB). (C) Brosch -
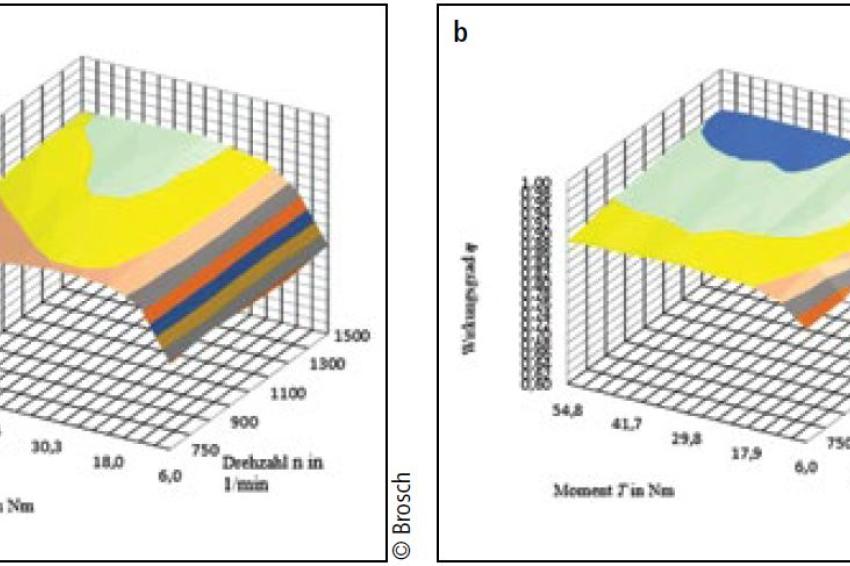 Abb. 4a+b: Kennlinien-Gebirge von Synchron-Reluktanzmotor (a) und Asynchronmotor (b) 7,5 kW, vierpolig am U-Umrichter (über dem Drehmoment und der Drehzahl ist der Wirkungsgrad in Schichten zu Δη =2 % aufgetragen [Bro16]). (C) Brosch
Abb. 4a+b: Kennlinien-Gebirge von Synchron-Reluktanzmotor (a) und Asynchronmotor (b) 7,5 kW, vierpolig am U-Umrichter (über dem Drehmoment und der Drehzahl ist der Wirkungsgrad in Schichten zu Δη =2 % aufgetragen [Bro16]). (C) Brosch -
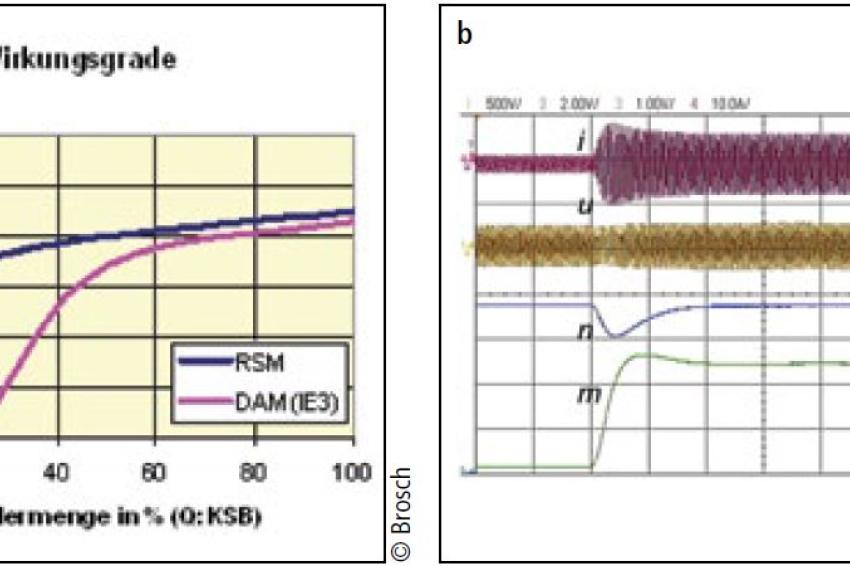 Abb. 5a+b: Vergleich von Asynchronmotor und Synchron-Reluktanzmotor [Bro16]. a: Wirkungsgrade bei quadratischer Pumpen-Kennlinie mit Last-Profil „Blauer Engel“. b: Lastsprünge mit Bemessungsmoment. (C) Brosch
Abb. 5a+b: Vergleich von Asynchronmotor und Synchron-Reluktanzmotor [Bro16]. a: Wirkungsgrade bei quadratischer Pumpen-Kennlinie mit Last-Profil „Blauer Engel“. b: Lastsprünge mit Bemessungsmoment. (C) Brosch
Gesetzliche Vorgaben und weiter steigende Energiepreise lenken das Augenmerk immer stärker auf die Effizienz der Elektroantriebe. Neben den alt bekannten Asynchron- und Synchronmotoren taucht nun ein „neuer“ Motor auf. Der Synchron-Reluktanzmotor wurde aus dem bisher bekannten Standard-Reluktanzmotor speziell für drehzahlvariablen Betrieb am Umrichter entwickelt. Er hat einen ausgezeichneten (Teillast-)Wirkungsgrad im Paket mit dem speisenden Umrichter und ist besonders effektiv bei Lastfällen mit quadratischer Drehmomentkennlinie – Kreiselpumpen und Zentrifugallüftern – kann aber auch Extruder energiesparend antreiben. Darüber wird im Folgenden berichtet.
Der Motor arbeitet nach dem sogenannten Reluktanzprinzip: Bringt man einen Eisenblechstreifen (= Läufer) in ein Magnetfeld, so richtet er sich entsprechend den Feldlinien aus. Wird der Streifen aus seiner Ruhelage um einen Polradwinkel ϑ ausgelenkt, wirkt ein Reluktanz-Drehmoment T rückstellend auf ihn, wie Abb. 2b zeigt. Der Polradwinkel ϑ hängt von der Last ab. Nach Wegfall des Last-Drehmomentes nimmt er wieder die Ausgangsruhelage ein. Dieses Grundprinzip wird beim Reluktanzmotor ausgenützt.
Reluktanzmotor
Der bereits 1923 patentierte Reluktanzmotor wurde bisher immer nur im Netzbetrieb in Nischenanwendungen eingesetzt und blieb so ein Mauerblümchen in der Antriebstechnik. Ziel dieser Einsätze war der direkte Netzbetrieb mit Anlauf und Synchronlauf. Sein Einsatzgebiet waren Textilmaschinen und Gleichlaufantriebe, bei denen mehrere Motoren synchron parallel am Netz hängen. Auch der Betrieb am Frequenzumrichter ist bekannt [Bro16]. Der Fokus lag auf dem Synchronlauf; cos ϕ und Wirkungsgrad waren schlecht.
Synchron-Reluktanzmotor
Der „neue“ Synchron-Reluktanzmotor (SRM) ist speziell für den drehzahlvariablen Betrieb am Controller (Frequenzumrichter mit Spannungszwischenkreis, U-Umrichter) ausgelegt. Der geblechte Ständer hat die Bauform eines Standard-Drehstromständers mit in Nuten liegender verteilter meist vier-poliger Drehstromwicklung. Der Läufer besticht durch seine einfache Konstruktion. Wesensmerkmale der Blechschnitte sind die eisernen Flussleitstege in Richtung der d-Achse (Pole) und die Flusssperren aus „Luft“ in Richtung der q-Achse (Lücken). Abb. 3a zeigt ein aktuelles vierpoliges stark anisotropes Läuferblech dieser Motoren. Endringe pressen das Blechpaket auf die Läuferwelle.
Der Läuferblechschnitt in Abb. 3 zeigt, dass der Fluss in der d-Achse (Pol) möglichst wenig magnetischen Widerstand (Reluktanz) findet und so gut geleitet wird, dagegen trifft er in der q-Achse (Lücke) auf einen großen magnetischen Widerstand (Luft) und wird dadurch schlecht geleitet. Um ein hohes Reluktanzmoment zu erzeugen, soll der Flussquotient Ψd / Ψq möglichst groß sein (ca. 6 - 8).
Drehzahlvariabler Betrieb
Wird die Ständerwicklung vom speisenden Umrichter bestromt, bilden sich die Pole des Reluktanzläufers aus. Sie synchronisieren sich mit dem Motorfeld und bleiben im Synchronismus, auch wenn das über einen Umrichter gespeiste Motorfeld mit der gewünschten Drehzahl n ~ f (Frequenz f) im Motor umläuft. Da keine Wicklung im Läufer ist, entstehen dort auch keine Verluste (Abb.: 3b). Daraus resultiert der im Vergleich zum Asynchronmotor mit seinen schlupfbedingten Läuferverlusten bessere Wirkungsgrad des Synchron-Reluktanzmotors. Wegen der fehlenden Läuferverluste bleiben sowohl die Welle als auch die Lager kalt und die Ständerwicklung wird ihre Verlustwärme besser los. Dies trägt zur Betriebssicherheit wesentlich bei und lässt zusätzlich die Lebenszykluskosten sinken. (Bei den Messungen wurden nur die Motoren verglichen, ohne die Umrichterverluste zu berücksichtigen, die etwa gleich anzunehmen sind).
In Abb. 4a sind die Wirkungsgradgebirge der beiden Motoren dargestellt. Bereits aus der Farbgebung der Wirkungsgradschichten (Δη =2 %) erkennt man, dass der Synchronreluktanzmotor auch im Teillastbereich und bei kleinen Drehzahlen einen sehr hohen Wirkungsgrad aufweist. Beim Asynchronmotor fallen die Wirkungsgrade im Teillastbereich und bei kleinen Drehzahlen stark ab. Da viele (Pumpen- und Lüfter-)Antriebe nur selten oder sogar nie im Volllastpunkt arbeiten, ist das ein großer Vorteil beim Einsatz von Synchron-Reluktanzmotoren im Gegensatz zu Asynchronmotoren [Bro16]. Das macht sich noch stärker bemerkbar, wenn man bei einer quadratischen Pumpen-Kennlinie auch noch das bekannte Last-Profil „Blauer Engel“ berücksichtigt, wie Abb. 5a zeigt.
Praxiseinsatz
Das Paket „Synchron-Reluktanzmotor mit U-Umrichter“ eignet sich besonders gut für drehzahlvariable Antriebe von Kreiselpumpen und Zentrifugallüfter. Der speisende Frequenzumrichter wird mit einer speziellen Software betrieben, damit der Synchron-Reluktanzmotor ohne teuren Läuferlagegeber arbeiten kann. Das reduziert die Kosten weiter. Wegen der Luftstrecken (in q-Richtung) in den Läuferblechen ist der Magnetisierungsstrom etwas höher als beim vergleichbaren Asynchronmotor. Dies wirkt sich aber nicht auf das speisende Netz aus, weil der magnetisierende Blindstrom vom Zwischenkreiskondensator des Umrichters gedeckt wird.
Die Materialeinsparung im Läufer des Synchron-Reluktanzmotors gegenüber dem Läufer eines Asynchronmotors gleicher Leistung führt zu einem kleineren Massenträgheitsmoment und macht den Motor leichter und dynamischer. Durch das Massenträgheitsmoment und das winkelabhängige Drehmoment stellt der Motor ein schwingungsfähiges Gebilde dar. Drehzahlpendelungen nach Laststößen werden aber schnell ausgeregelt, wie Abb. 5b zeigt. Die untersuchten Synchron-Reluktanzmotoren laufen gegen ein Drehmoment von 1,5 x Bemessungsmoment an und sind auch damit überlastbar. Sie verkraften auch Stoßdrehmoment in gleicher Größenordnung ohne „außer Tritt“ zu fallen. Das ermöglicht den Einsatz bei Extrudern, Transportbandanlagen sowie als Antriebe in Flurförderfahrzeugen.
Fazit für den Praktiker
Der Synchron-Reluktanzmotor ist im Paket mit dem passenden Frequenzumrichter zu haben. Wegen seines hohen Wirkungsgrades – auch im Teillastbereich – eignet er sich besonders für Pumpen- und Lüfterantriebe und alle Antriebsaufgaben, die mit hohen Betriebsstundenzahlen laufen. Wegen der gleichen mechanischen Motorabmessungen ist besonders Retrofit von Anlagen leicht möglich. Die elektrische Anpassung erledigt eine Selbstabgleich-Software. Drehzahlvariable Antriebe mit diesem Paket amortisieren sich meist in weniger als zwei Jahren. Der Trend zum Reluktanz-Paket wird auch durch den Zwang zur Umsetzung der EU Richtlinie EG640/2009 (Motoren und Pumpen) gefördert, die ab 2017 höhere Wirkungsgrade im Leistungsbereich von 750 W bis 375 kW vorschreiben [ErP09, ZVEI Handout]. Probieren Sie es und sparen Sie Energie und Kosten!
Literatur und weitere Unterlagen
[Bro16] Brosch, Peter F.: Antriebspraxis. Vogel Verlag Würzburg, 1. Auflage 2016
[ErP09] ErP-Richtlinie 2009/125/EG Verordnung EG 640/2009 (Motoren und Pumpen) sowie EU 327/2011 (Ventilatoren)
[ZVEI Handout] Energieeffizienz mit elektrisch angetriebenen Arbeitsmaschinen – Norm EN 50 598, Nov. 2014
Synchron-Reluktanzmotor im Internet:
www.abb.de, www. ksb.com, www.reel.it, www.siemens.de
Contact
Hoschule Hannover
Expo Plaza 4
30539 Hannover
Deutschland




